12 Comprendre les features
Ce chapitre est en cours de revue et peut nécessiter des changements.
Cette section ne s’adresse pas à tout le monde. Si vous souhaitez utiliser les features MOSAIKS disponibles via l’API pour vos prédictions, vous pouvez ignorer cette section. Cependant, si vous prévoyez de générer vos propres features, cette section est faite pour vous.
12.1 MOSAIKS et “kitchen sinks” ?
MOSAIKS signifie Multi-task Observation using SAtellite Imagery & Kitchen Sinks. On nous demande souvent d’où vient l’expression kitchen sinks (évier de cuisine). Elle provient de l’expression anglaise everything but the kitchen sink, qui signifie “presque tout ce que l’on peut imaginer”.
Dans le contexte de MOSAIKS, cette métaphore illustre notre approche : nous extrayons une quantité massive d’informations à partir des images satellites, sans pour autant capturer chaque pixel ou chaque relation possible. Nous sélectionnons les ingrédients les plus utiles (les features) et laissons le reste de côté.
L’idée d’abandonner les images brutes est essentielle à la puissance de MOSAIKS. Cela signifie que la plupart des utilisateurs n’ont jamais à manipuler directement ces volumes massifs d’imagerie satellitaire. L’équipe MOSAIKS prend en charge ce traitement et extrait un grand ensemble de features convolutionnelles aléatoires (RCFs), puis élimine les images sources.
L’utilisateur final n’a pas besoin de voir les images brutes ni d’interpréter chaque caractéristique individuellement. Il peut directement exploiter ces représentations numériques compactes pour ses propres modèles prédictifs.
Dans cette section, nous allons lever le capot et voir comment ces features sont extraites à partir des images satellites.
Dans ce manuel, les termes random convolutional features, RCFs, features, satellite features, et MOSAIKS features sont utilisés de manière interchangeable.
12.2 Transformer des images en features
12.2.1 Vue d’ensemble
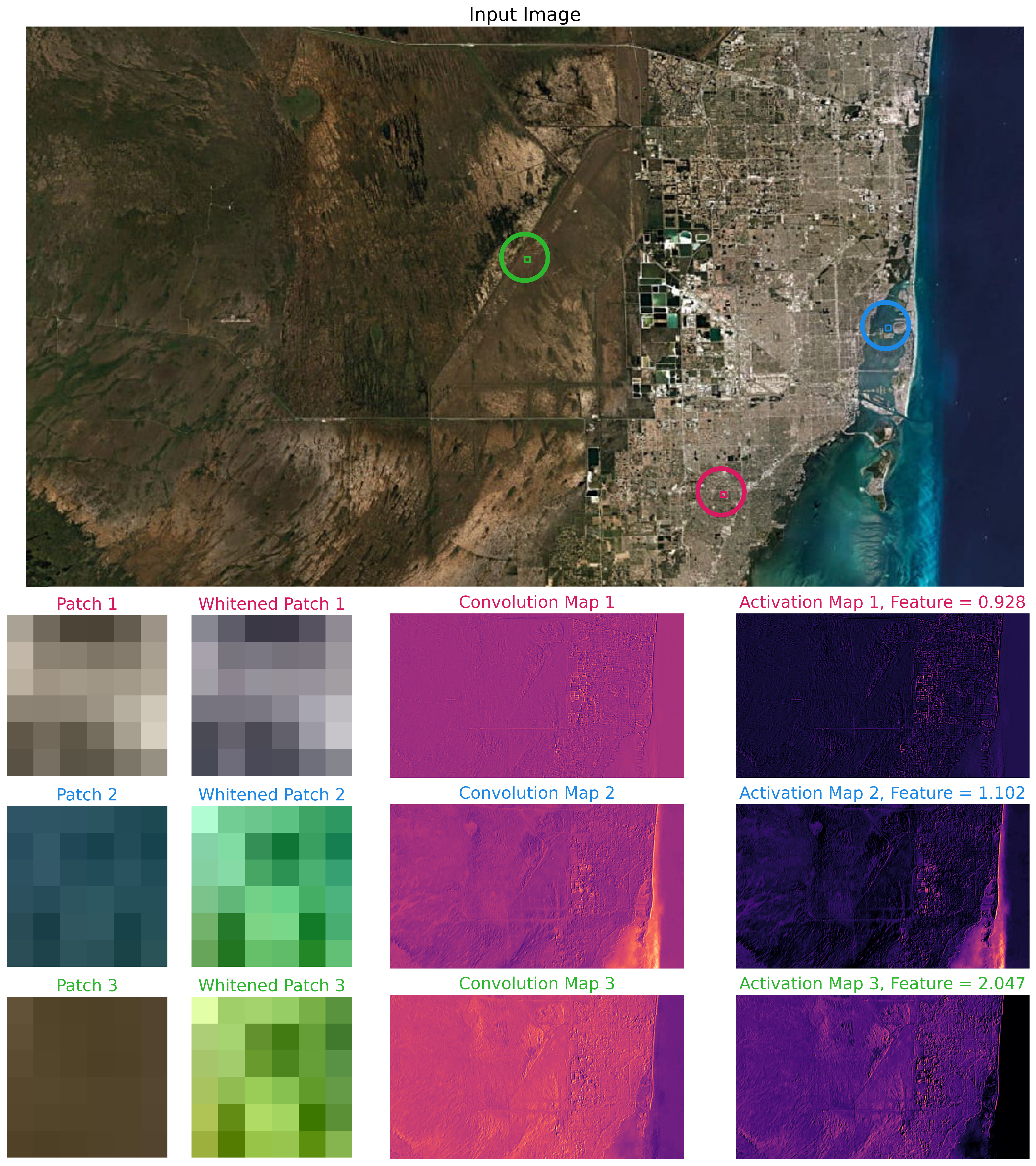
Le processus de featurization de MOSAIKS produit une représentation de longueur fixe pour chaque patch d’image satellite. Concrètement, cela signifie que nous obtenons un vecteur numérique pour chaque image. Comme MOSAIKS utilise des images satellites, chaque image représente une localisation spécifique, et donc chaque localisation est associée à un vecteur de features.
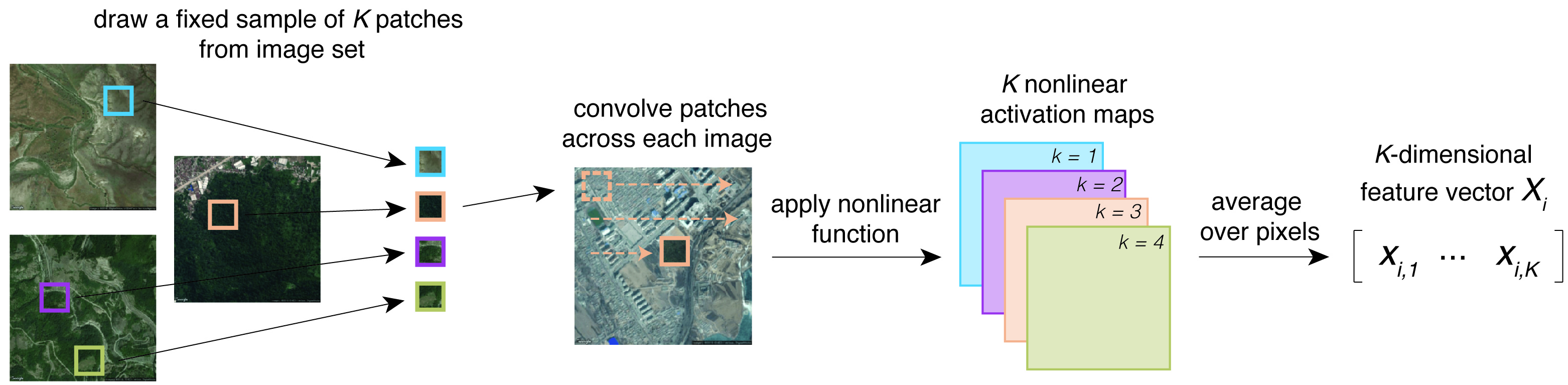
Le processus de featurization comporte trois étapes principales :
-
Convolution
-
Activation
- Pooling (moyennage spatial)
Nous allons illustrer ces étapes en prenant l’exemple d’une image d’entrée de dimensions \(3 \times 256 \times 256\) (trois canaux couleur : rouge, vert et bleu, avec une taille de 256x256 pixels).
12.2.2 Comprendre les convolutions
En termes simples, une convolution permet de détecter certains motifs dans une image : contours, textures ou couleurs. Un filtre de convolution “glisse” sur l’image et applique des opérations mathématiques sur de petites zones.
Contrairement aux réseaux de neurones profonds (CNNs) qui empilent plusieurs couches convolutives, MOSAIKS utilise une seule couche de convolution. Ces poids convolutifs sont initialisés de manière aléatoire et restent fixes, ce qui signifie que les features extraites ne sont pas ajustées pour une tâche spécifique.
12.2.3 Activation
Après la convolution, on applique une fonction d’activation non linéaire, ReLU (Rectified Linear Unit). Cette fonction définit toute valeur négative à zéro :
\[ \text{ReLU}(x) = \max(0, x) \]
Cela permet de capturer les non-linéarités présentes dans l’image.
Un avantage clé :
MOSAIKS génère deux features par filtre :
-
Une caractéristique avec la sortie ReLU
- Une caractéristique avec la sortie ReLU inversée (multipliée par -1)
Cette approche optimise l’efficacité du modèle et double la richesse de l’information extraite.
12.2.4 Pooling : Réduction de la dimension spatiale
La dernière étape consiste à appliquer une couche de pooling adaptatif pour réduire la carte d’activation à une seule valeur par filtre.
Concrètement, cela moyenne les activations sur toute l’image, produisant un résumé compact de l’information capturée.
12.2.5 Synthèse du processus
Nous répétons ces trois étapes pour tous les filtres définis dans le modèle. Ainsi, si nous avons K filtres, nous obtenons un vecteur de features de dimension K.
12.3 Pourquoi utiliser les RCFs ?
L’approche de MOSAIKS remplace l’apprentissage par minimisation par une approche basée sur la randomisation.
Contrairement aux CNNs traditionnels qui optimisent leurs filtres par rétropropagation (backpropagation), MOSAIKS applique une convolution aléatoire et ne met jamais à jour ses filtres. Cela semble contre-intuitif, mais cette approche présente plusieurs avantages clés :
-
Légèreté et généralisation
- Pas besoin d’adapter les features à une tâche spécifique
- Réutilisation des mêmes features pour une multitude d’applications
- Pas besoin d’adapter les features à une tâche spécifique
-
Scalabilité et rapidité
- Pas d’apprentissage à grande échelle
- Génération rapide des features pour toute la planète
- Pas d’apprentissage à grande échelle
-
Richesse des motifs capturés
- Échantillonne une grande variété de textures, couleurs et structures spatiales
-
Distribution simplifiée
- Contrairement aux images brutes, les vecteurs de features sont faciles à stocker, télécharger et manipuler
12.4 Résumé
Les features convolutionnelles aléatoires (RCFs) constituent l’épine dorsale de MOSAIKS :
-
Elles remplacent les CNNs complexes par une approche randomisée et sans entraînement
-
Elles sont généralisables et peuvent être appliquées à n’importe quelle tâche prédictive
- Elles permettent un traitement à grande échelle, sans nécessiter d’accéder aux images brutes
En convertissant les images en vecteurs numériques compacts, les RCFs offrent un pont puissant entre l’imagerie satellitaire et l’apprentissage automatique.
Dans la prochaine section, nous verrons comment accéder aux features pré-calculées disponibles via l’API MOSAIKS, sans avoir à effectuer la featurization vous-même.